

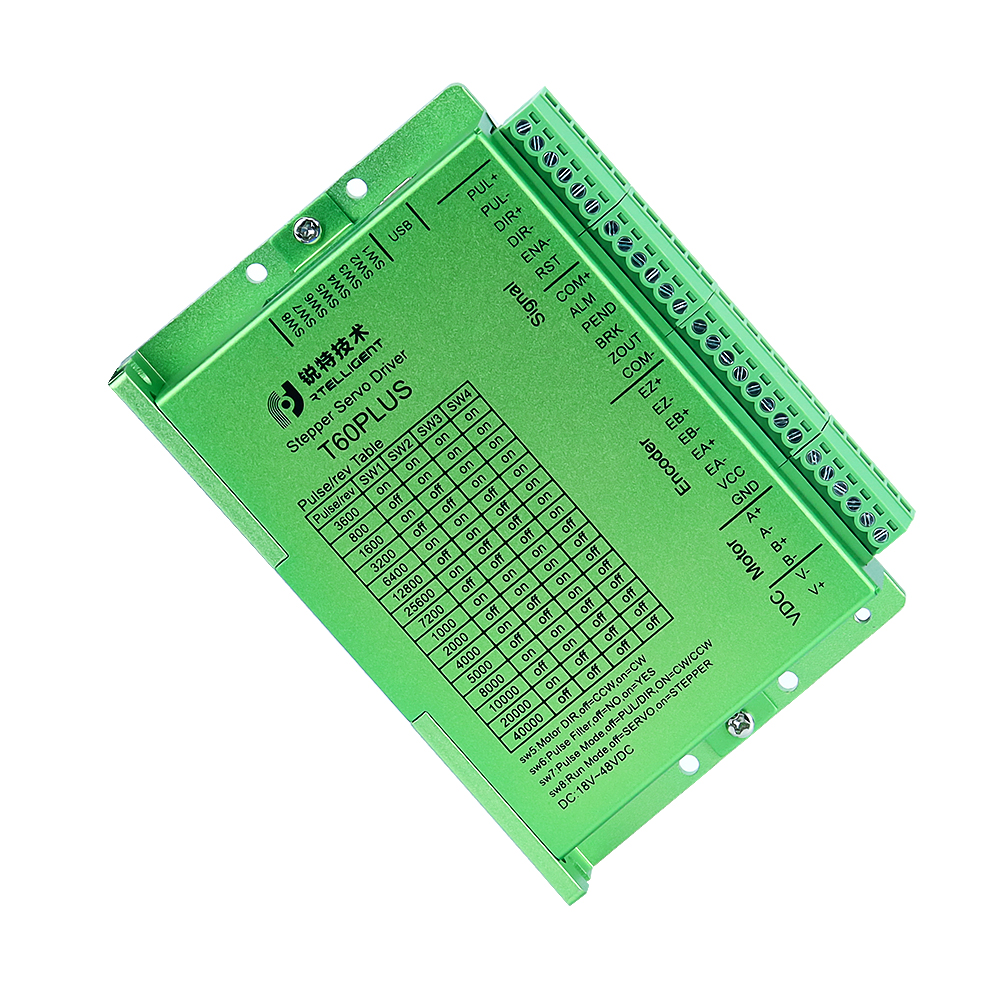
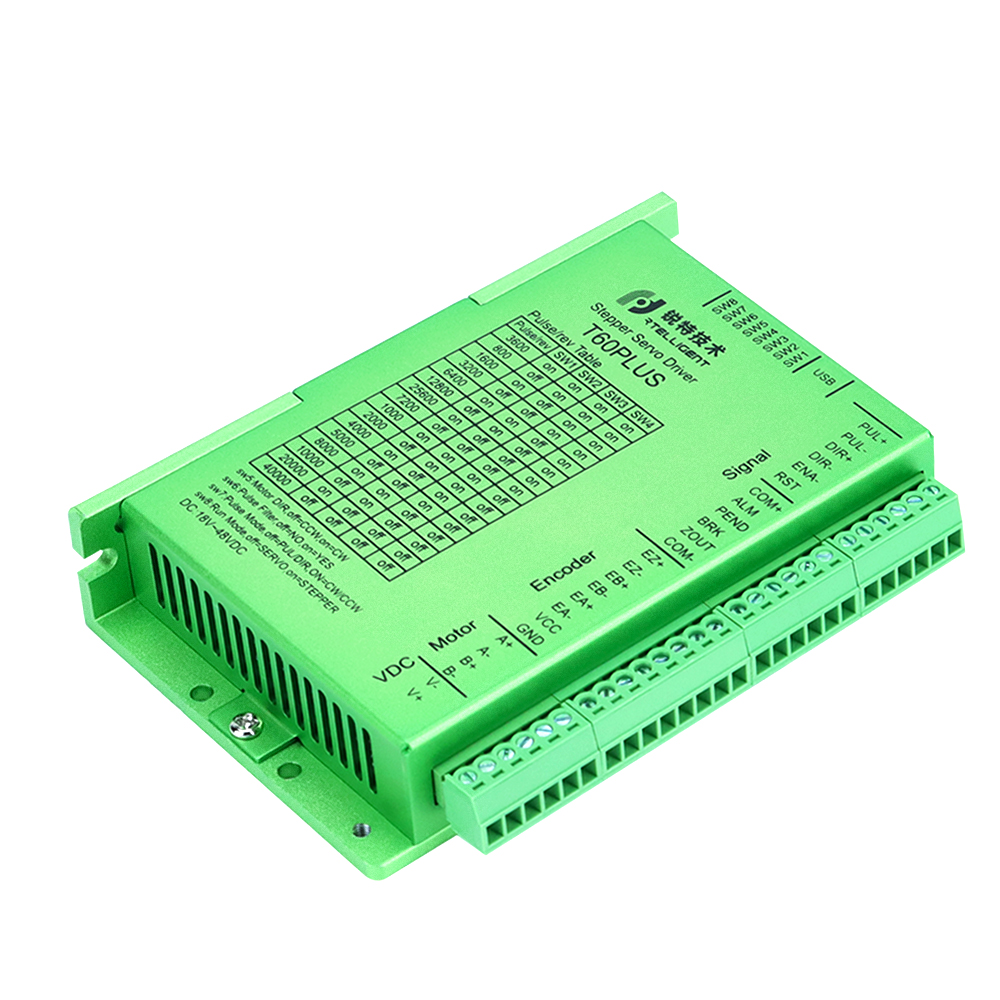


Penggerak Stepper Loop Tertutup 2 Fase Kontrol Pulsa T60Plus


Pengenalan Produk



Koneksi

Fitur
| Catu daya | Tegangan 18~48VDC |
| Kontrol presisi | 4000 Pulsa/r |
| Mode pulsa | Arah & pulsa, pulsa ganda CW/CCW, pulsa kuadratur A/B |
| Kontrol saat ini | Algoritma kontrol vektor servo |
| Pengaturan subdivisi | Pengaturan sakelar DIP, 15 opsi (atau pengaturan perangkat lunak debugging) |
| Rentang kecepatan | Konvensional 1200~1500rpm, hingga 4000rpm |
| Penekanan resonansi | Perhitungan otomatis titik resonansi untuk menekan getaran frekuensi menengah |
| Penyesuaian parameter PID | Debugging perangkat lunak untuk menyesuaikan karakteristik PID motor |
| Filter pulsa | Penyaring sinyal digital 2MHz |
| Keluaran alarm | Keluaran alarm untuk arus lebih, tegangan lebih, kesalahan posisi, dll. |
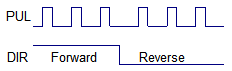
Mode Pulsa
Antarmuka sinyal drive seri T standar berbentuk pulsa, dan T60PLUS V3.0 dapat menerima tiga jenis sinyal perintah pulsa.
| Pulsa dan arah (PUL + DIR) |
|
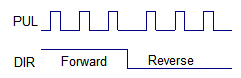
| Pulsa ganda (CW +CCW) |
|
| Denyut ortogonal (denyut ortogonal A/ B) | 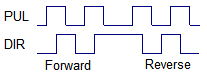 |
Pengaturan Langkah Mikro
| Denyut nadi/putaran | SW1 | SW2 | SW3 | SW4 | Perkataan |
| 3600 | on | on | on | on | Sakelar DIP diputar ke status “3600” dan perangkat lunak pengujian dapat dengan bebas mengubah subdivisi lainnya. |
| 800 | mati | on | on | on | |
| tahun 1600 | on | mati | on | on | |
| 3200 | mati | mati | on | on | |
| 6400 | on | on | mati | on | |
| 12800 | mati | on | mati | on | |
| 25600 | on | mati | mati | on | |
| 7200 | mati | mati | mati | on | |
| 1000 | on | on | on | mati | |
| tahun 2000 | mati | on | on | mati | |
| 4000 | on | mati | on | mati | |
| 5000 | mati | mati | on | mati | |
| 8000 | on | on | mati | mati | |
| 10000 | mati | on | mati | mati | |
| 20000 | on | mati | mati | mati | |
| 40000 | mati | mati | mati | mati |
Pengaturan Langkah Mikro
Terminal drive terbakar?
1. Jika terjadi hubungan pendek antara terminal, periksa apakah belitan motor mengalami hubungan pendek.
2. Jika resistansi internal antar terminal terlalu besar, silakan periksa.
3. Jika penyolderan berlebih ditambahkan pada sambungan antara kabel untuk membentuk bola solder.
Penggerak stepper loop tertutup memiliki alarm?
1. Jika terjadi kesalahan koneksi untuk kabel enkoder, pastikan untuk menggunakan kabel ekstensi enkoder yang benar, atau hubungi Rtelligent jika Anda tidak dapat menggunakan kabel ekstensi karena alasan lain.
2. Periksa apakah encoder rusak seperti keluaran sinyal.
-
 Panduan Pengguna Rtelligent T60PLUS V3.0
Panduan Pengguna Rtelligent T60PLUS V3.0




