Penggerak Stepper Loop Tertutup 2 Fase Kontrol Pulsa T42


Pengenalan Produk



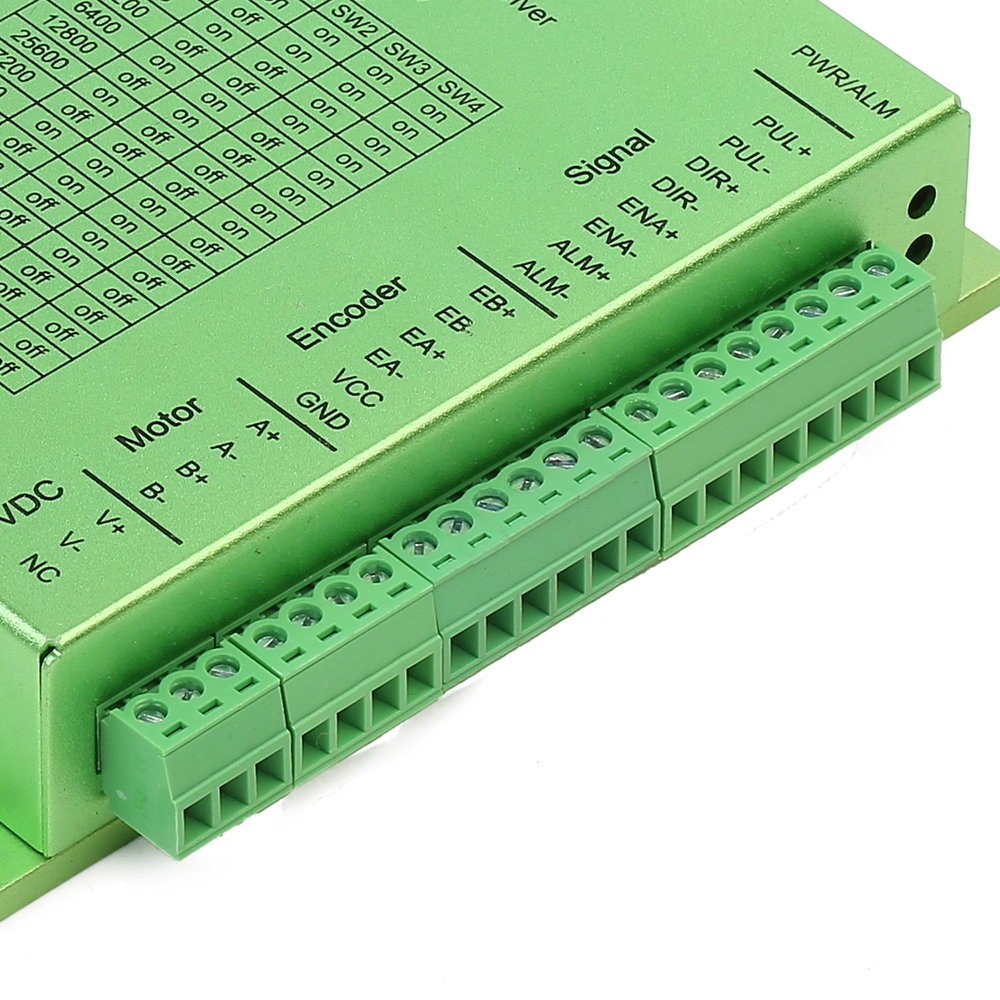
Koneksi

Fitur
| Catu daya | Tegangan 18 –68 VDC |
| Kontrol presisi | 4000 Pulsa/r |
| Mode pulsa | Arah & pulsa, pulsa ganda CW/CCW |
| Kontrol saat ini | Algoritma kontrol vektor servo |
| Pengaturan langkah mikro | Pengaturan sakelar DIP, 15 opsi (atau pengaturan perangkat lunak debugging) |
| Rentang kecepatan | Konvensional 1200 ~ 1500rpm, hingga 4000rpm |
| Penekanan resonansi | Secara otomatis menghitung titik resonansi dan menghambat getaran IF |
| Penyesuaian parameter PID | Uji perangkat lunak untuk menyesuaikan karakteristik PID motor |
| Penyaringan pulsa | Penyaring sinyal digital 2MHz |
| Keluaran alarm | Keluaran alarm arus berlebih, tegangan berlebih, kesalahan posisi, dll. |
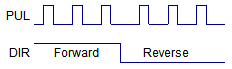
Mode Pulsa
Antarmuka sinyal driver seri T standar berbentuk pulsa, dan T60 dapat menerima dua jenis sinyal perintah pulsa.
| Pulsa dan arah (PUL + DIR) |
|
| Pulsa ganda (CW +CCW) | 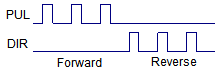 |
Pengaturan Langkah Mikro
| Denyut nadi/putaran | SW1 | SW2 | SW3 | SW4 | Perkataan |
| 3600 | on | on | on | on | Sakelar DIP diputar ke status “3600” dan perangkat lunak pengujian dapat dengan bebas mengubah subdivisi lainnya. |
| 800 | mati | on | on | on | |
| tahun 1600 | on | mati | on | on | |
| 3200 | mati | mati | on | on | |
| 6400 | on | on | mati | on | |
| 12800 | mati | on | mati | on | |
| 25600 | on | mati | mati | on | |
| 7200 | mati | mati | mati | on | |
| 1000 | on | on | on | mati | |
| tahun 2000 | mati | on | on | mati | |
| 4000 | on | mati | on | mati | |
| 5000 | mati | mati | on | mati | |
| 8000 | on | on | mati | mati | |
| 10000 | mati | on | mati | mati | |
| 20000 | on | mati | mati | mati | |
| 40000 | mati | mati | mati | mati |
-
 Panduan Pengguna Rtelligent T42
Panduan Pengguna Rtelligent T42